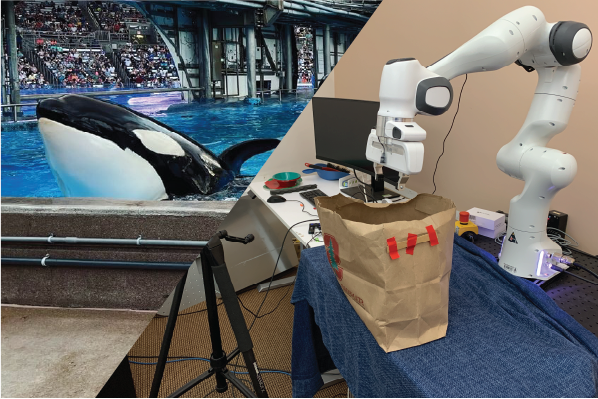
Hey there! I an incoming Ph.D. student at Stanford University and a research intern at the U.S. Navy Marine Mammal Program. I received my bachelors at Stanford in 2024, where I studied computer science, psychology (minor), and creative writing (minor). I worked in Chelsea Finn's IRIS lab on robot learning. I am grateful to be suppoorted by a Knight-Hennessy Fellowship.
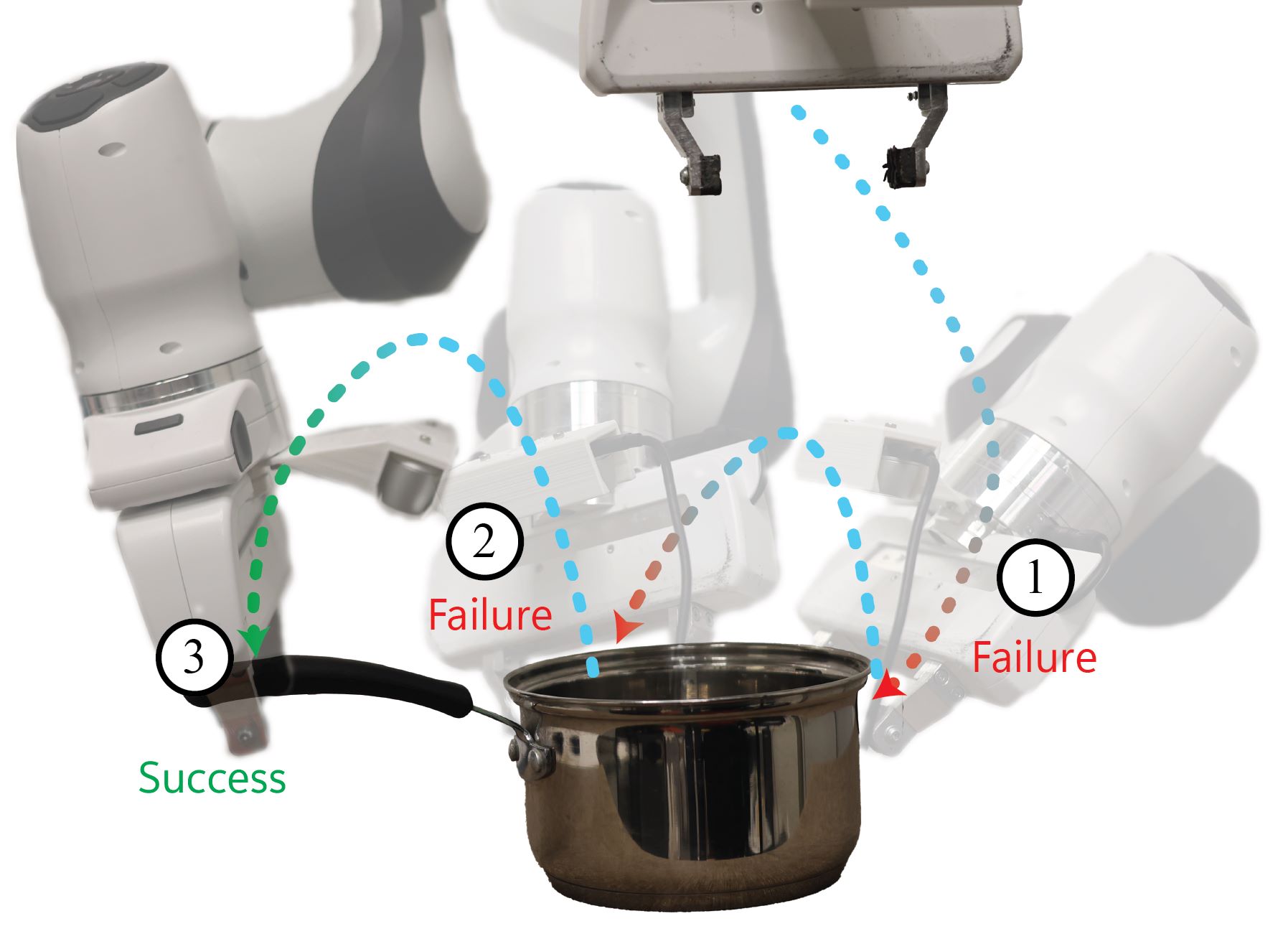
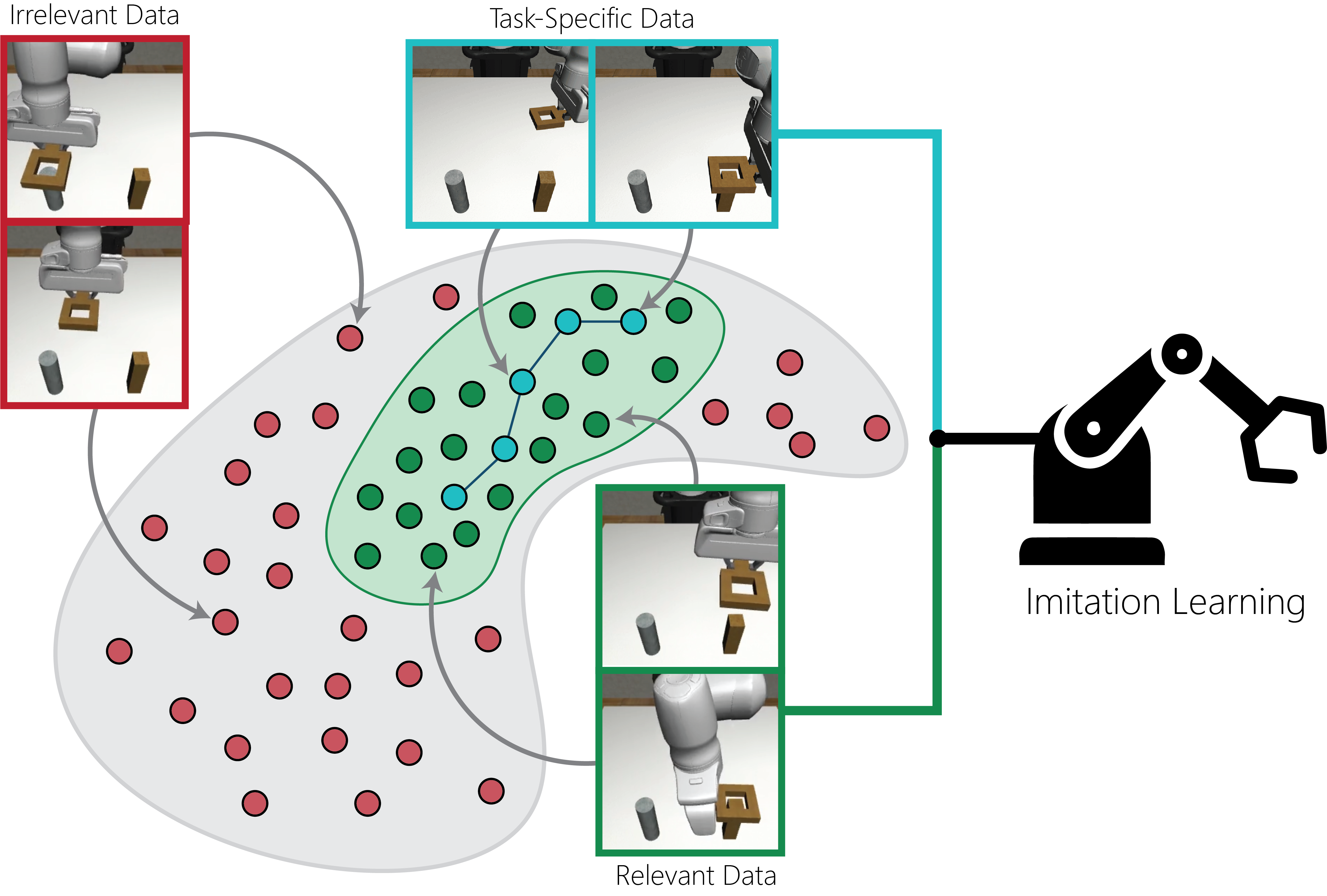
I'm broadly interested in how robots can learn and reason like humans and animals. During my Ph.D., I want to get robots to acquire skills autonomously, create rich interpretations of reinforcement, and adapt quickly to unexpected situations. I'm also interested in how we can meaningfully quantify the diverse arrays of intelligences in living creatures and artificial systems.
In my free time, I love to write short fiction and creative non-fiction. I'm working on a book that looks at the often-misrepresented stories of marine mammal trainers and the zoological industry.